
Install Steam
login
|
language
简体中文 (Simplified Chinese)
繁體中文 (Traditional Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Български (Bulgarian)
Čeština (Czech)
Dansk (Danish)
Deutsch (German)
Español - España (Spanish - Spain)
Español - Latinoamérica (Spanish - Latin America)
Ελληνικά (Greek)
Français (French)
Italiano (Italian)
Bahasa Indonesia (Indonesian)
Magyar (Hungarian)
Nederlands (Dutch)
Norsk (Norwegian)
Polski (Polish)
Português (Portuguese - Portugal)
Português - Brasil (Portuguese - Brazil)
Română (Romanian)
Русский (Russian)
Suomi (Finnish)
Svenska (Swedish)
Türkçe (Turkish)
Tiếng Việt (Vietnamese)
Українська (Ukrainian)
Report a translation problem















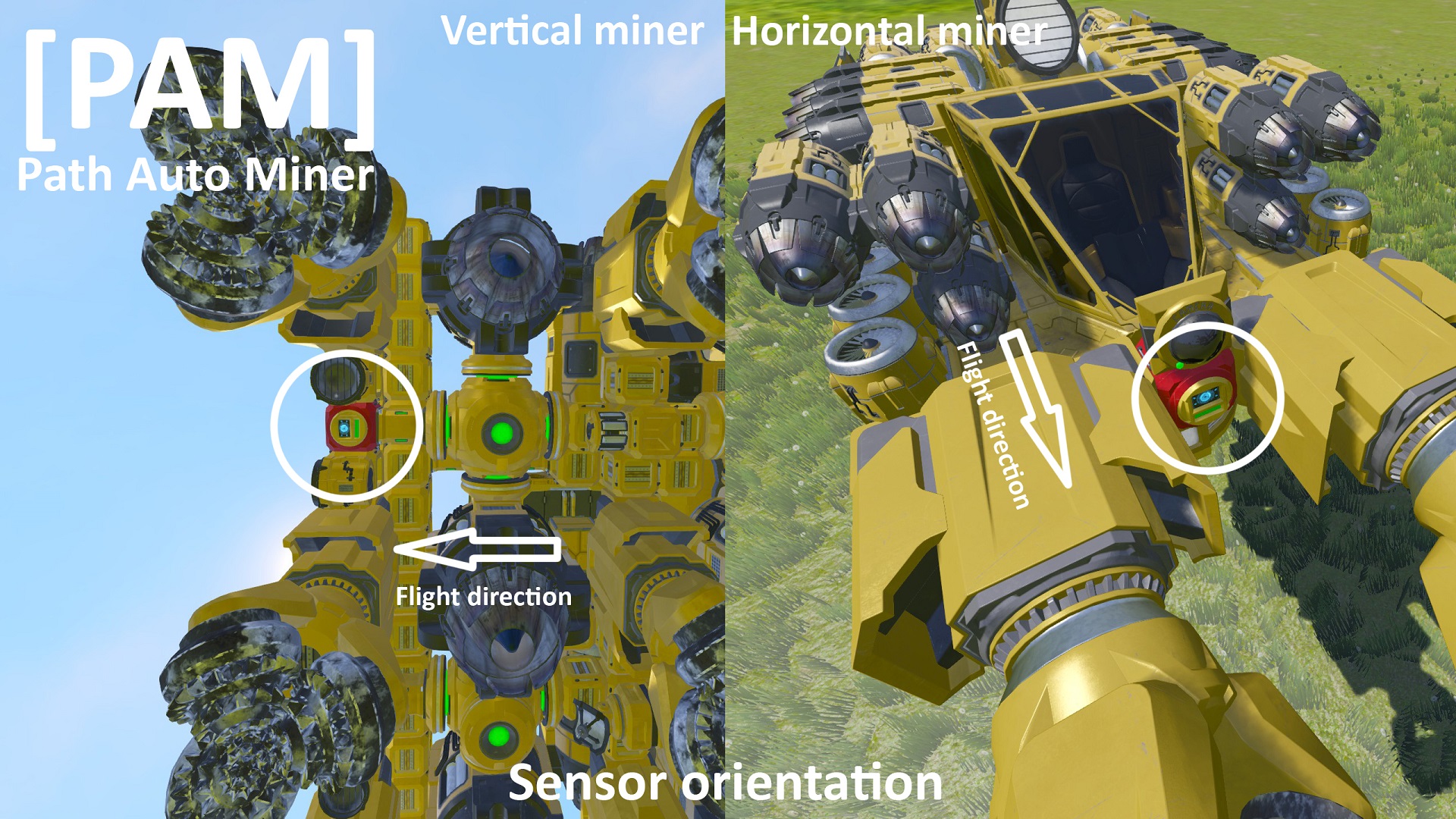






1) Ships that had existing sensors on them and that have worked for months are getting warnings that the sensor is facing the wrong direction.
2) Removing the PAM tag will or removing the sensor itself removes that warning.
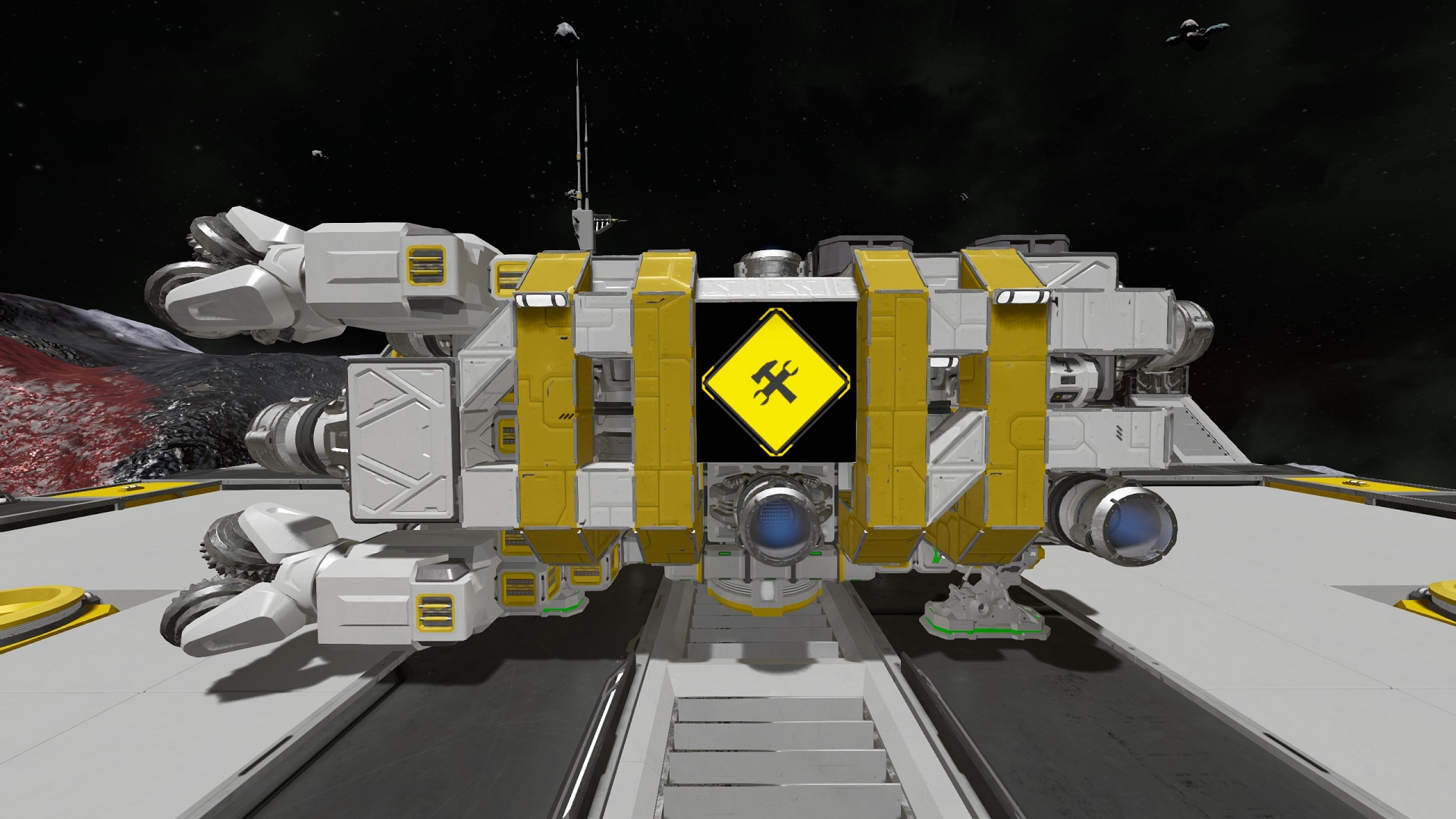
I'm including a workshop blueprint of a ship with no sensor at all that works just fine.
https://steamcommunity.com/sharedfiles/filedetails/?id=3255956399
Adding a sensor to the top of it with the arrows facing forward and tagged [PAM] results in an immediate warning that the sensor is facing the wrong direction.
Removing the [PAM] tag removes the error and does not interfere with operations at all.
Adding a sensor to the top of it with the arrows facing backward and tagged [PAM] generates no immediate error, but as soon as a mining job starts, generates a warning message that the sensor is facing the wrong direction.
I sorted it out, but your answer seems . . . inaccurate . . . at best.