
Install Steam
login
|
language
简体中文 (Simplified Chinese)
繁體中文 (Traditional Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Български (Bulgarian)
Čeština (Czech)
Dansk (Danish)
Deutsch (German)
Español - España (Spanish - Spain)
Español - Latinoamérica (Spanish - Latin America)
Ελληνικά (Greek)
Français (French)
Italiano (Italian)
Bahasa Indonesia (Indonesian)
Magyar (Hungarian)
Nederlands (Dutch)
Norsk (Norwegian)
Polski (Polish)
Português (Portuguese - Portugal)
Português - Brasil (Portuguese - Brazil)
Română (Romanian)
Русский (Russian)
Suomi (Finnish)
Svenska (Swedish)
Türkçe (Turkish)
Tiếng Việt (Vietnamese)
Українська (Ukrainian)
Report a translation problem









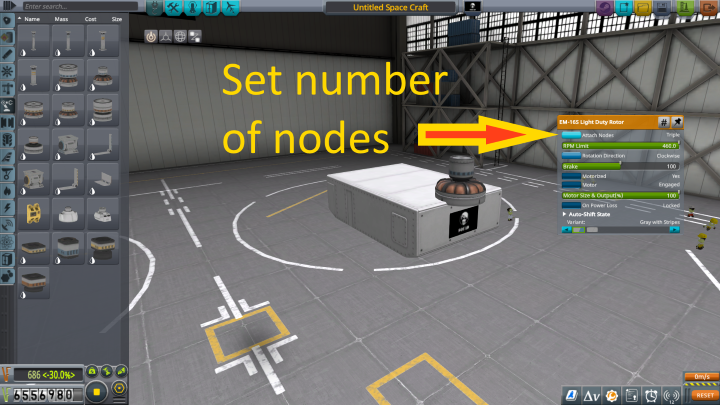
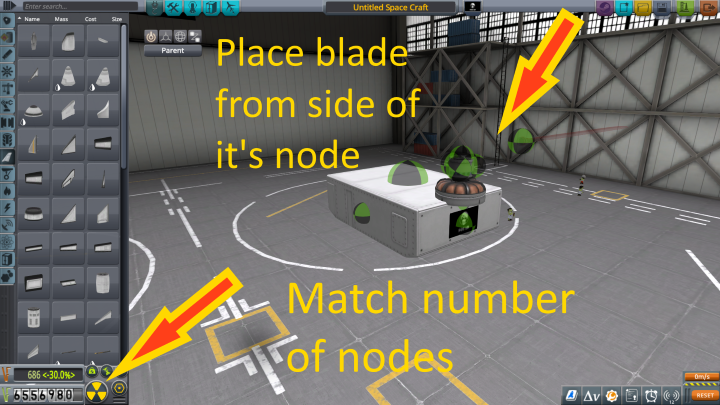
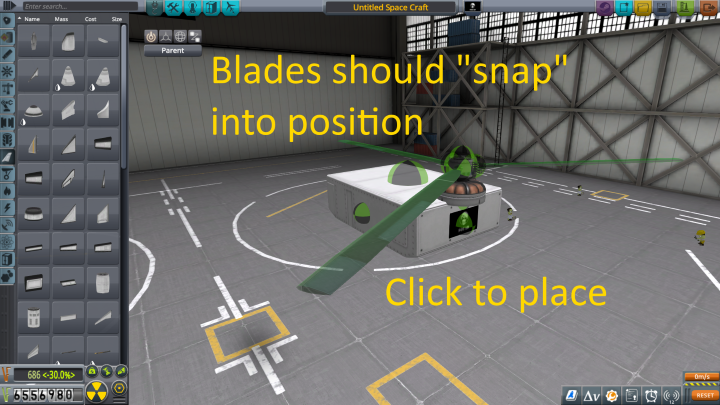

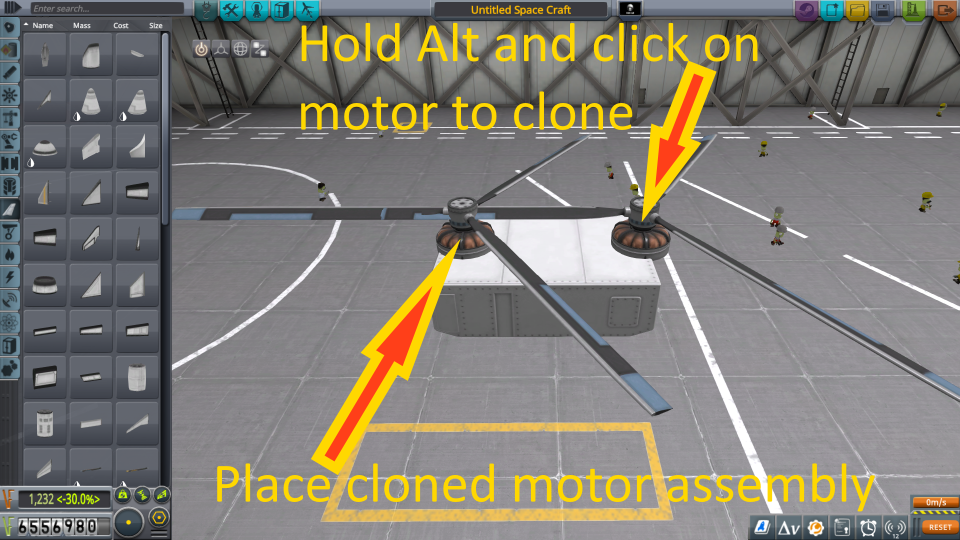
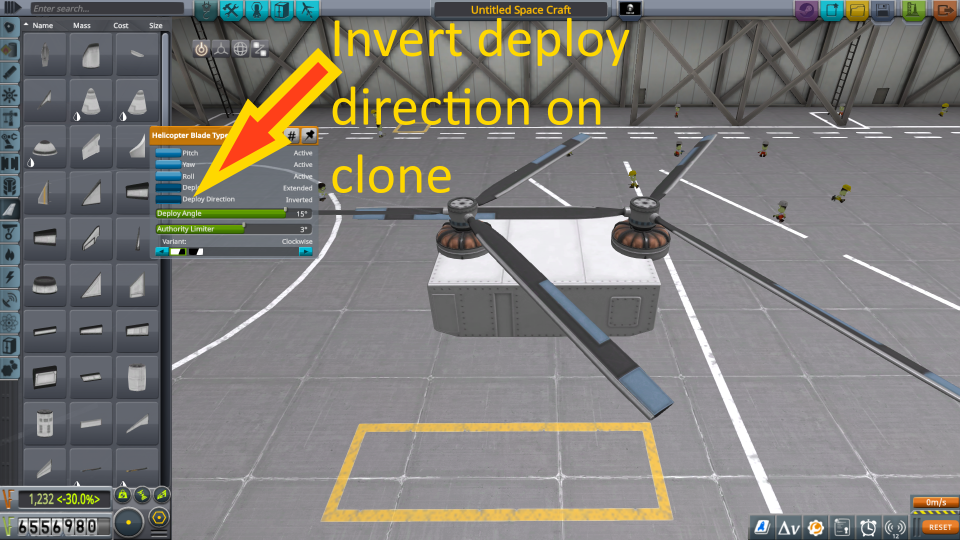


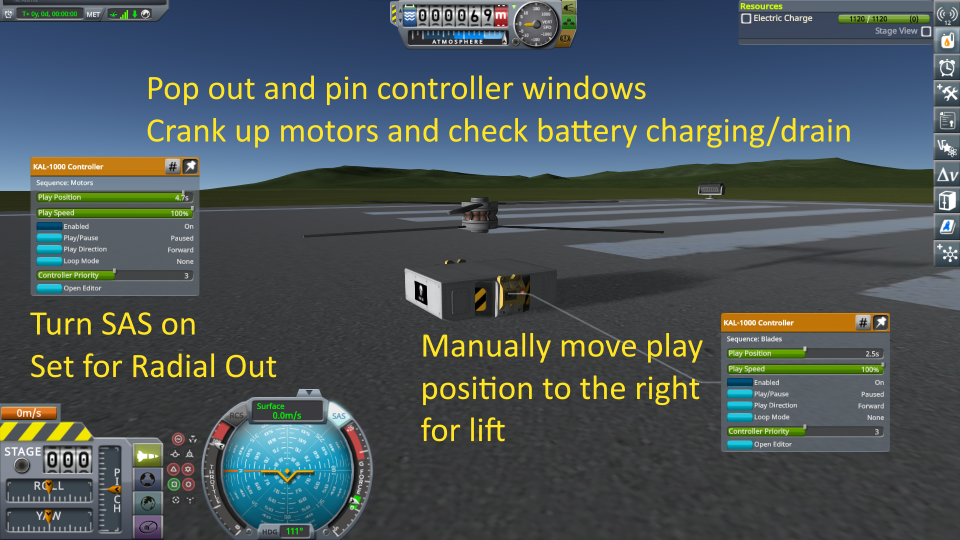







The "snap" for the blades works without holding Alt. You just need to align the green dot end toward the rotor and move it next to it. <place the blade from its node end pic> you know when to click to put them down when they show up in the set selected ghosted.
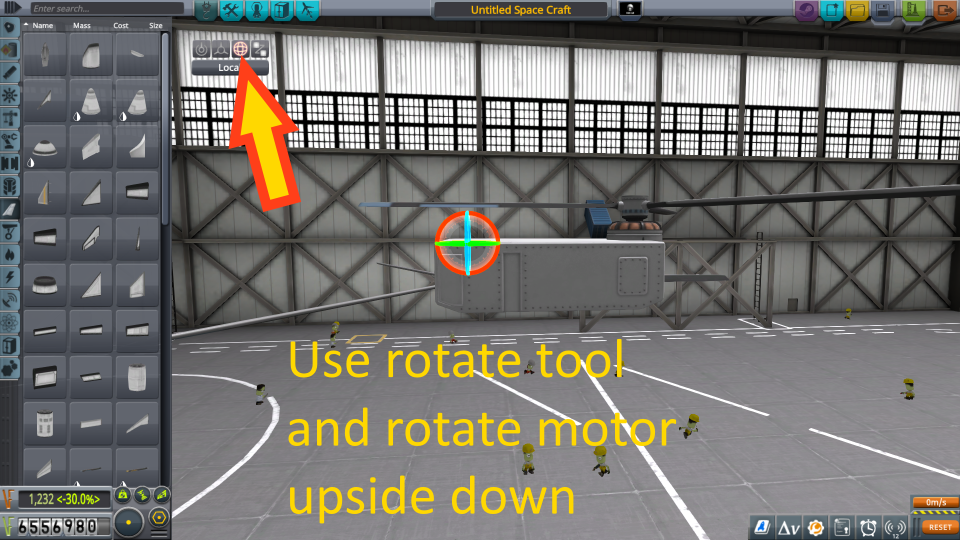
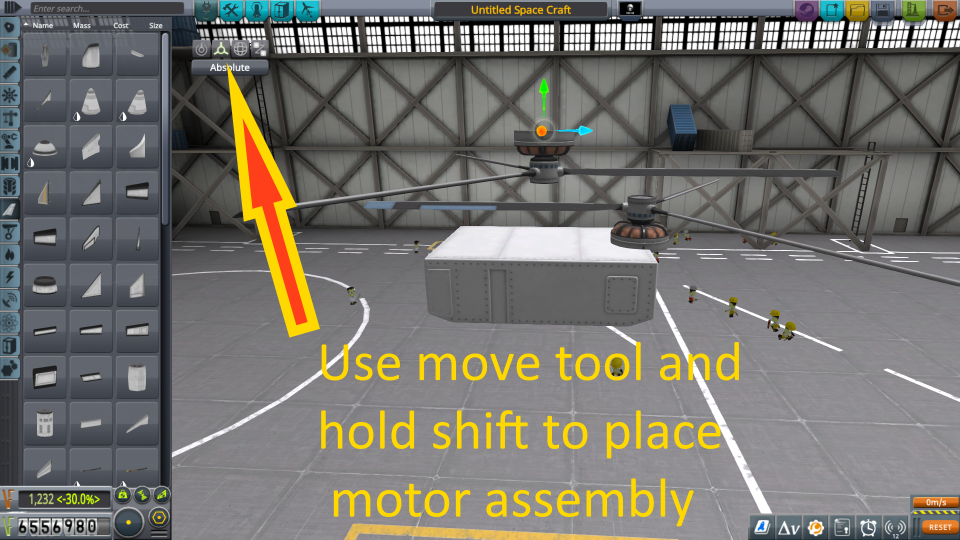
It works best for me placing the rotor facing up and placing them. If they are forward the snap might be weird or something. You can always rotate the motor to propeller mode <fwd/rev> after you place the blades.
Hope that helps.
If you tilt too much it gets confused... my guess is one of your rotors is losing it and causing the uneven torque issue.
As mentioned in the I've fallen and can't get up section I think the pitch and roll stuff gets dumb if you tilt too far. Entering auto-pilot as described above and catching the air again is the only solution I have found when it gets out of control.