
Install Steam
login
|
language
简体中文 (Simplified Chinese)
繁體中文 (Traditional Chinese)
日本語 (Japanese)
한국어 (Korean)
ไทย (Thai)
Български (Bulgarian)
Čeština (Czech)
Dansk (Danish)
Deutsch (German)
Español - España (Spanish - Spain)
Español - Latinoamérica (Spanish - Latin America)
Ελληνικά (Greek)
Français (French)
Italiano (Italian)
Bahasa Indonesia (Indonesian)
Magyar (Hungarian)
Nederlands (Dutch)
Norsk (Norwegian)
Polski (Polish)
Português (Portuguese - Portugal)
Português - Brasil (Portuguese - Brazil)
Română (Romanian)
Русский (Russian)
Suomi (Finnish)
Svenska (Swedish)
Türkçe (Turkish)
Tiếng Việt (Vietnamese)
Українська (Ukrainian)
Report a translation problem






































































https://steamcommunity.com/sharedfiles/filedetails/?id=3247360849
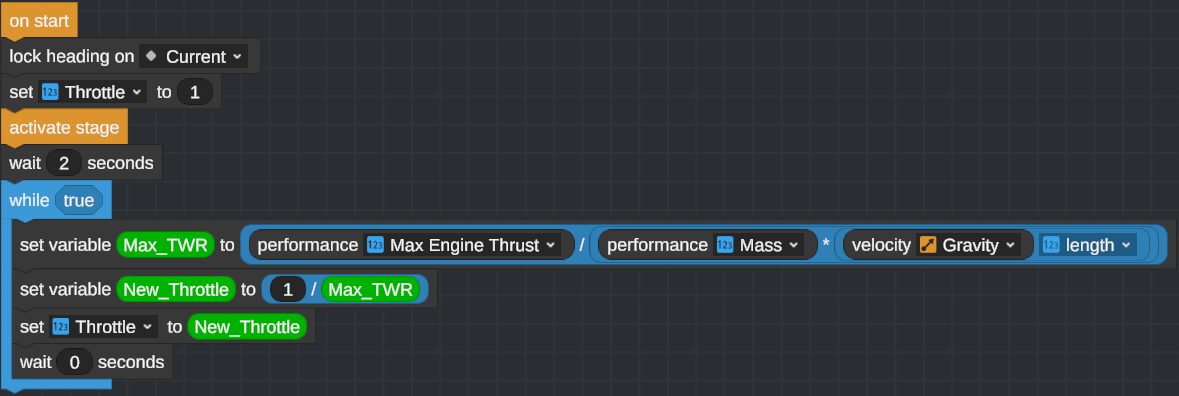
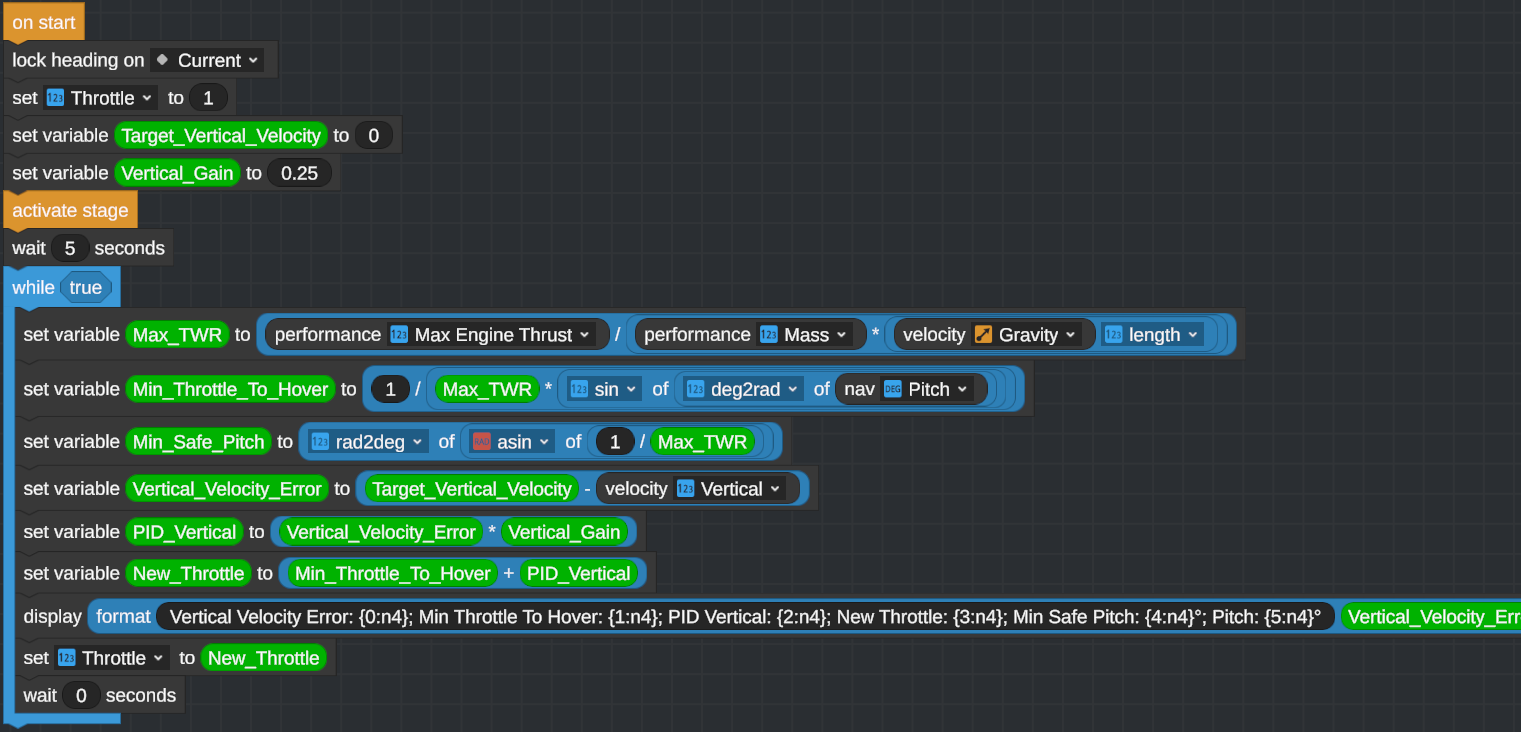
Look foe the section "Roll autopilot (1/2)". It is standalone code, so it should plug-in directly into what you are attempting to do.
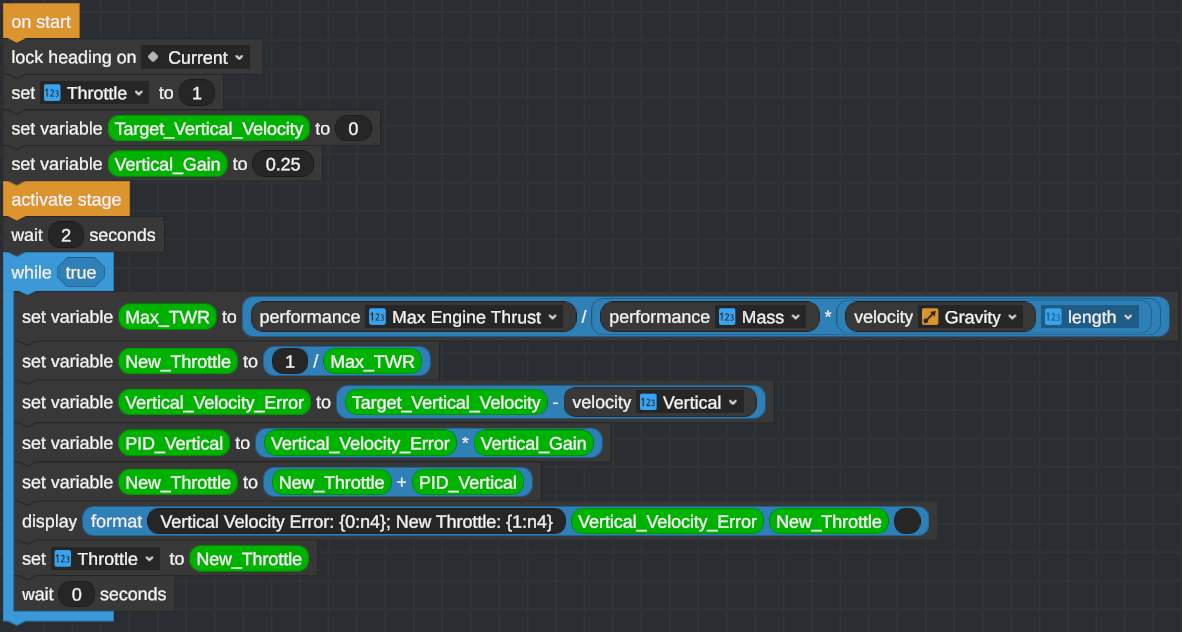
The short version is you need to write another PID and measure the rotation rate and limit the rotation rate. It isn't perfect but it works reasonable well.
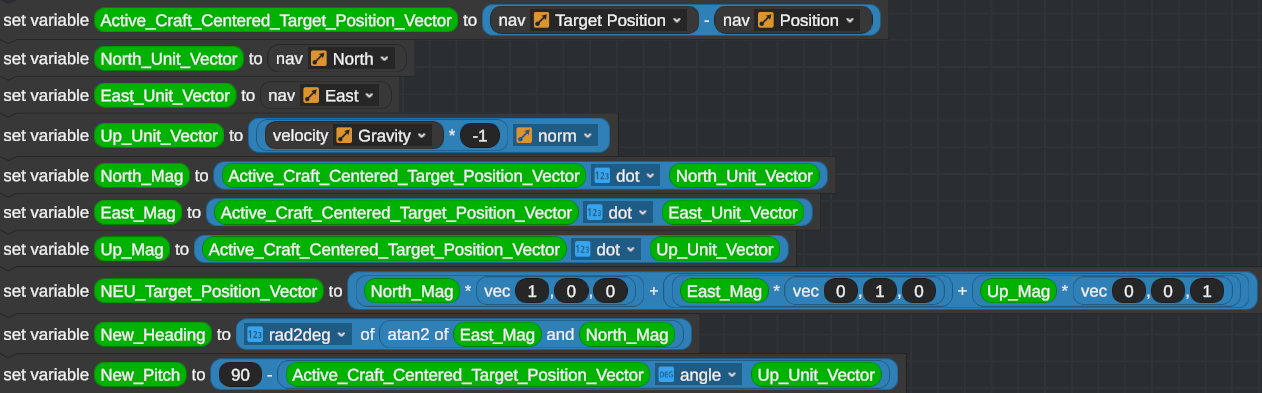
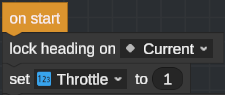
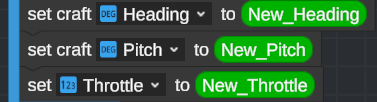
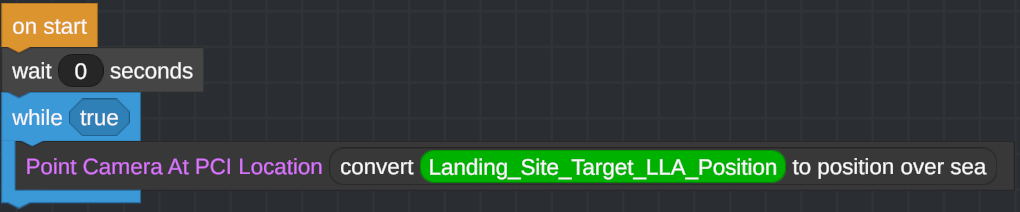
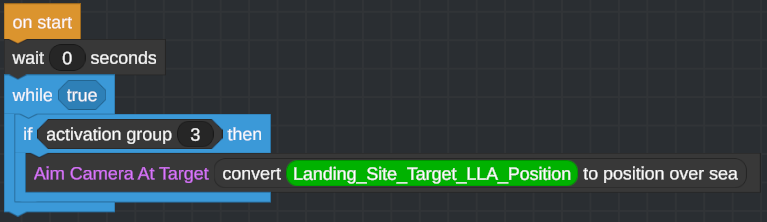
But the problem is that I do not know how to use it. I need it to go to a certain roll value, which I already have, but I don’t know how to make the rocket go to that roll value. My attempt was set the pitch to 90, wait 0 seconds, lock heading on none since if it is locked on a heading the autopilot overrides the roll input, and then set roll to the difference between the actual and the desired roll in a loop, but this created a ton of occilation and overshooting. Does anyone know how to do a smoother roll to the desired roll?
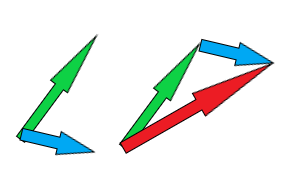
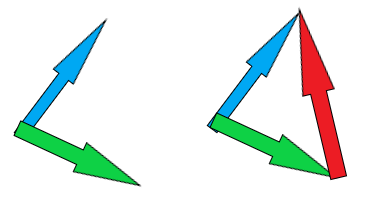
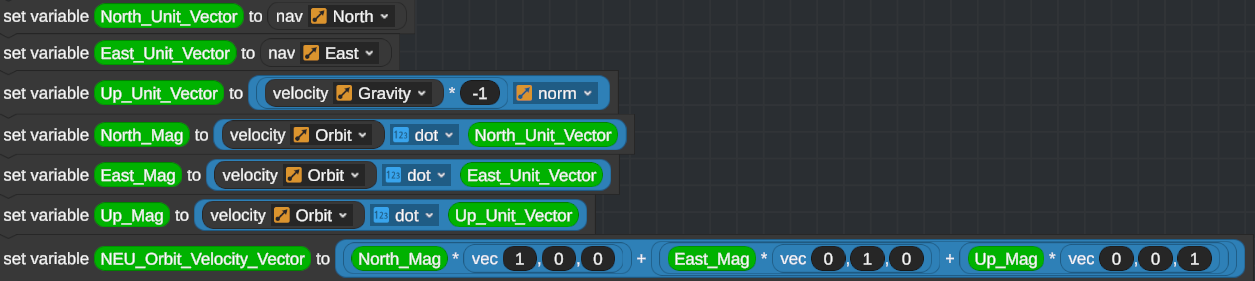
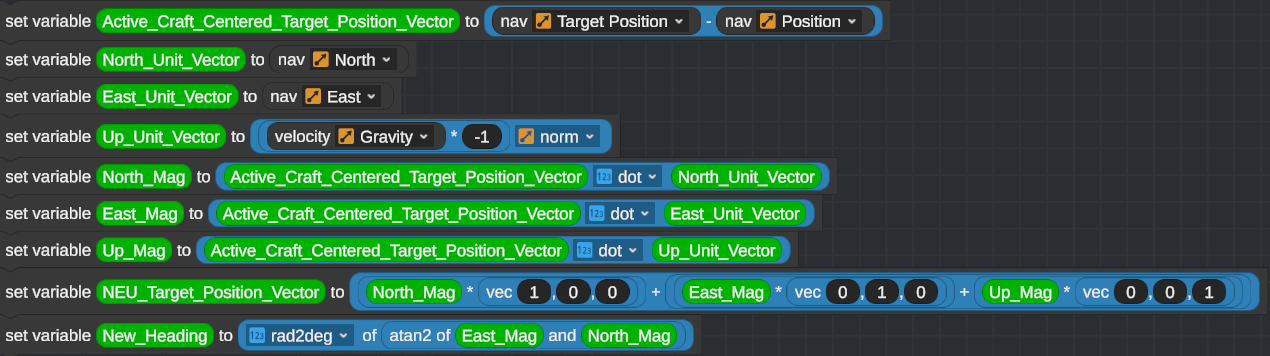
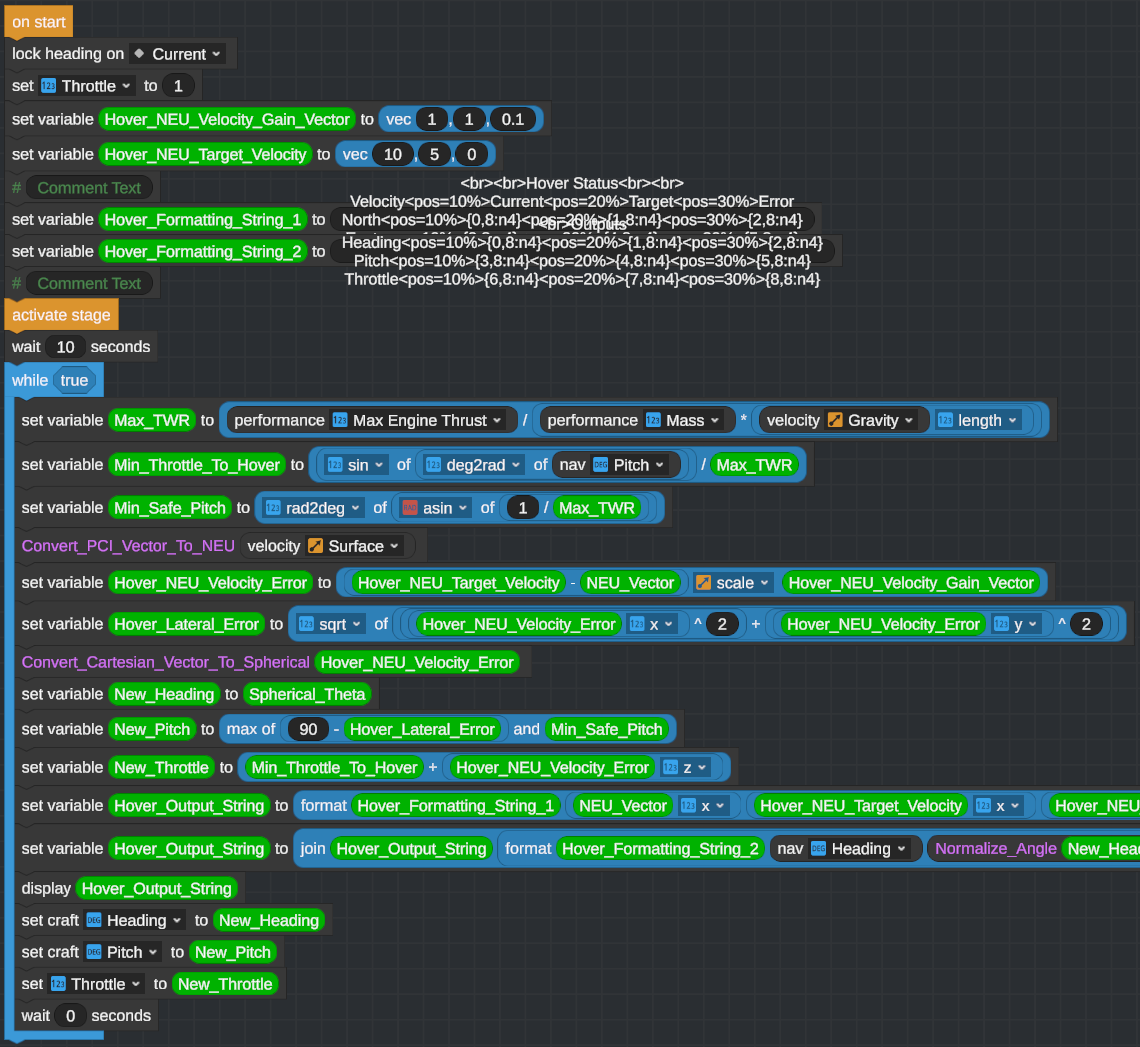
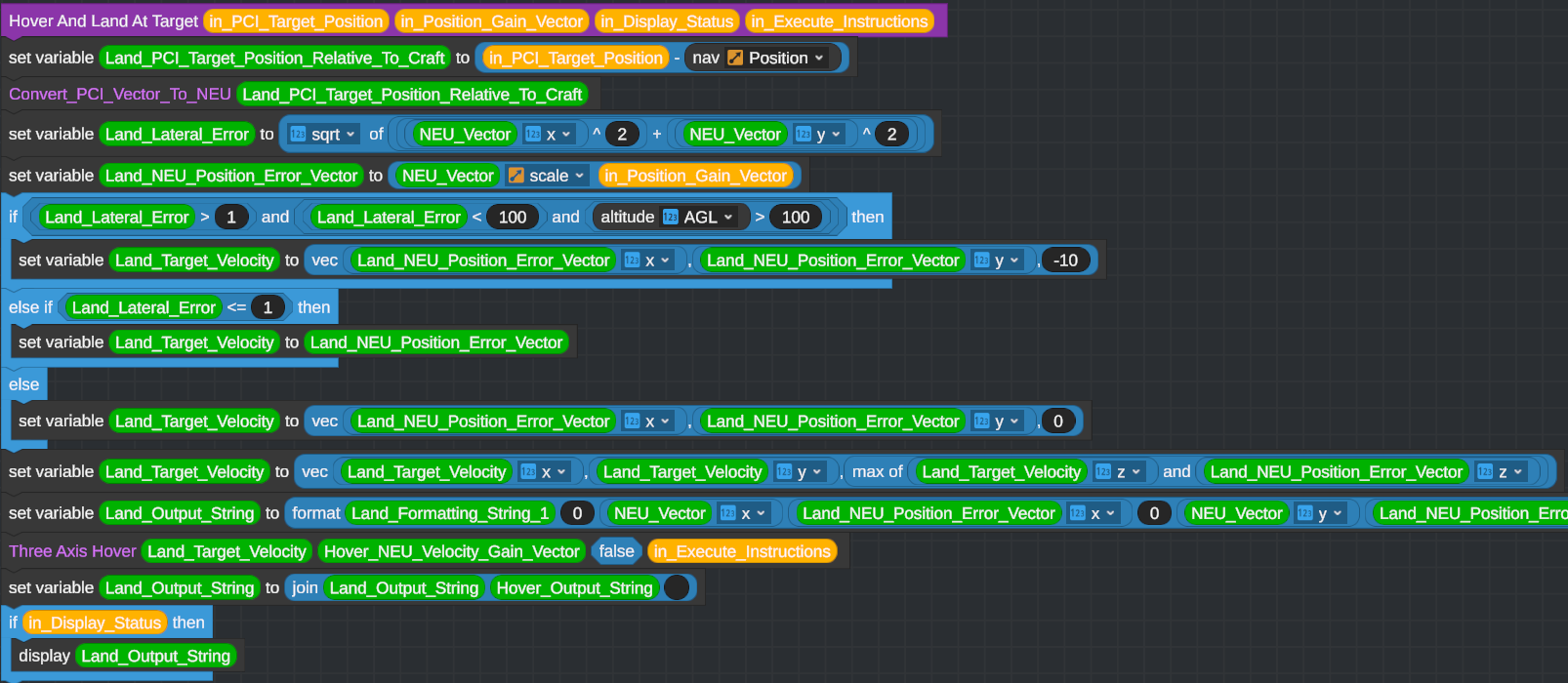
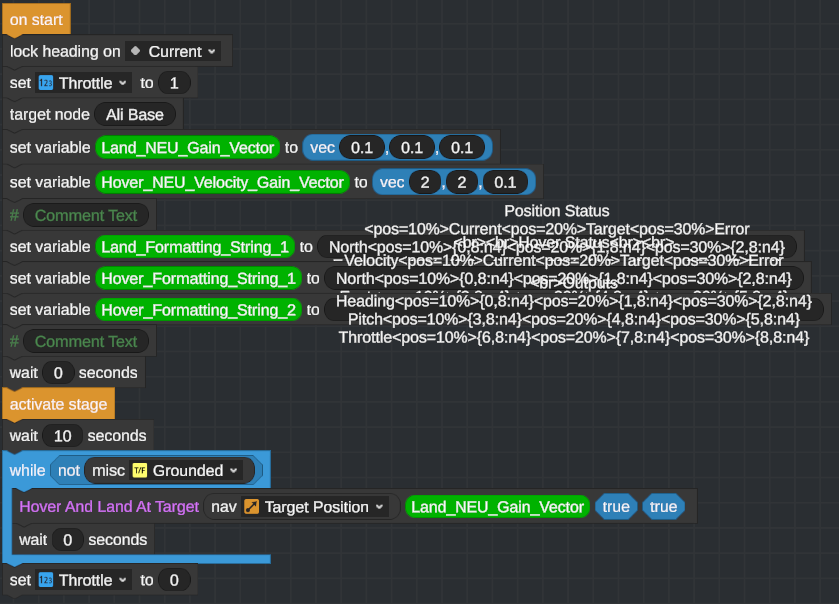
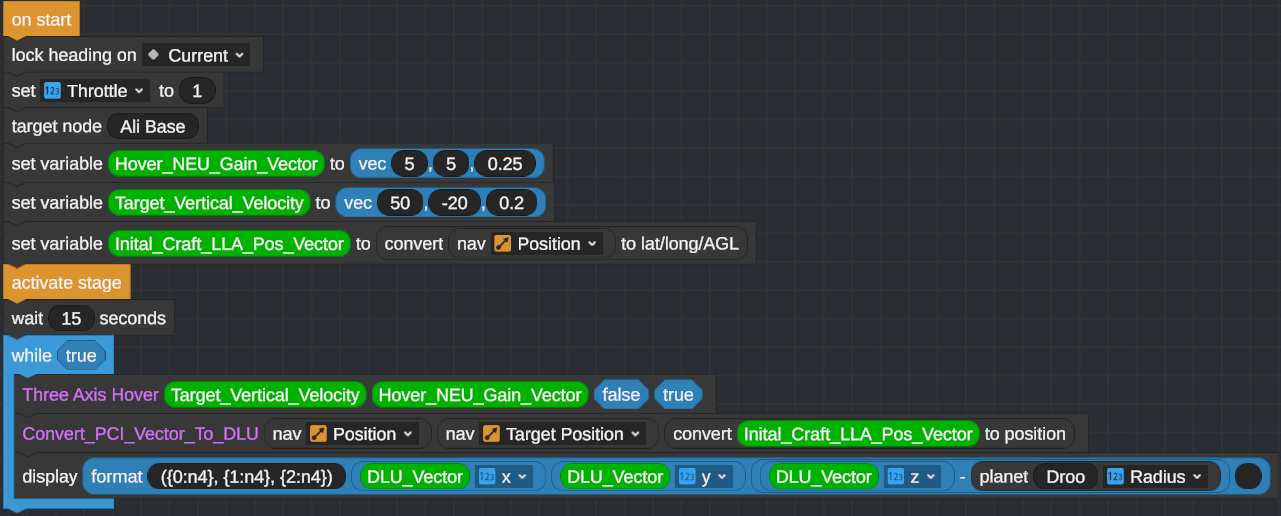
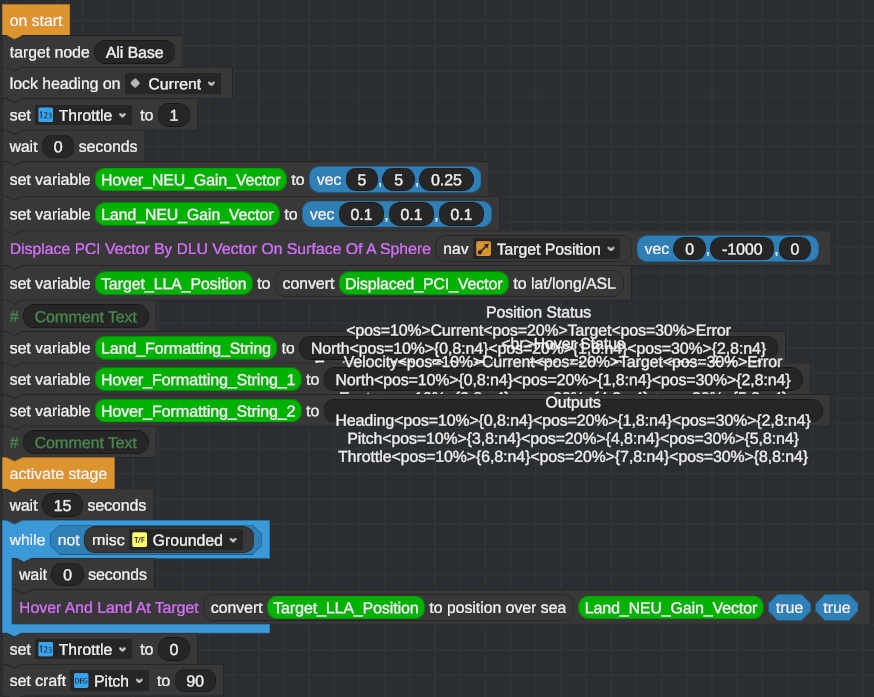
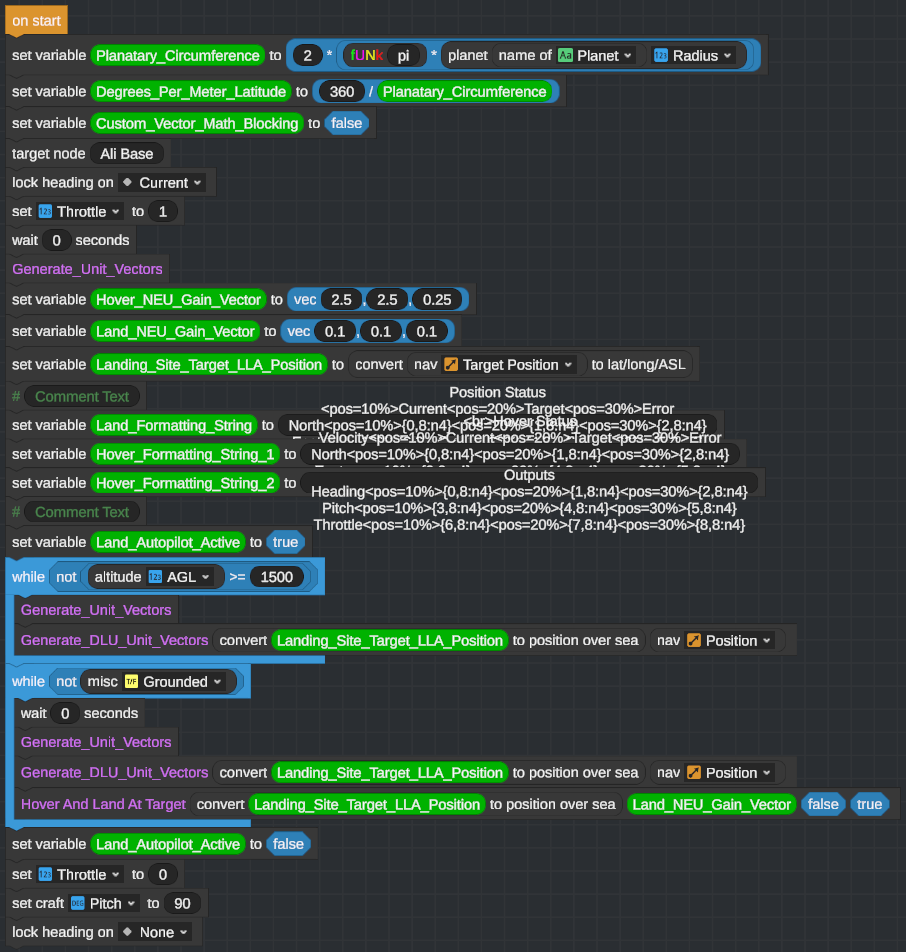
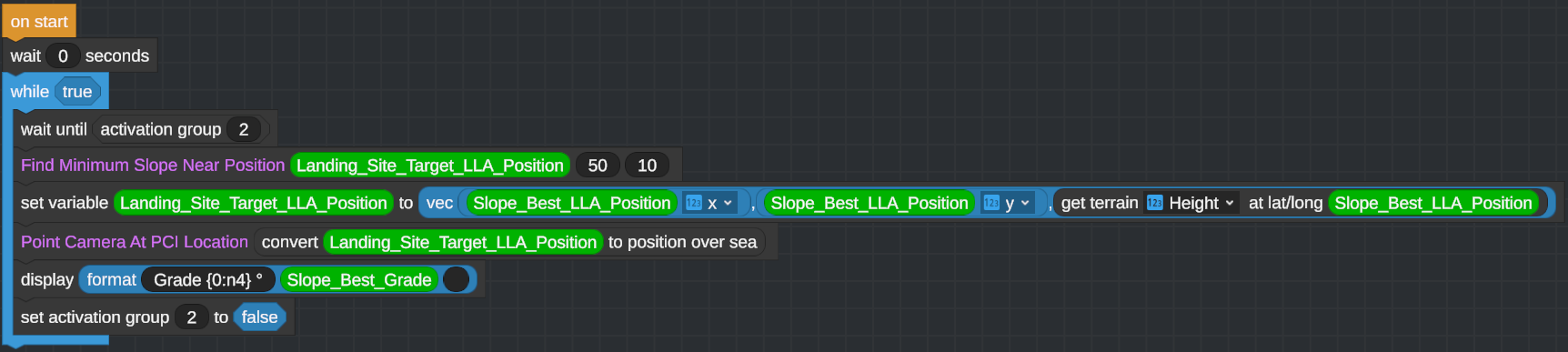
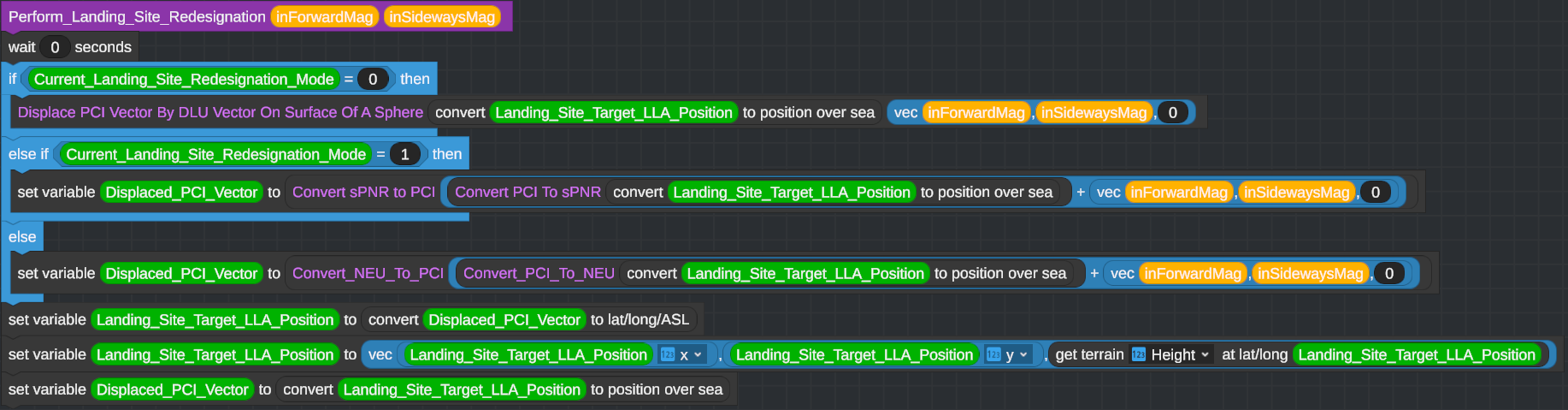
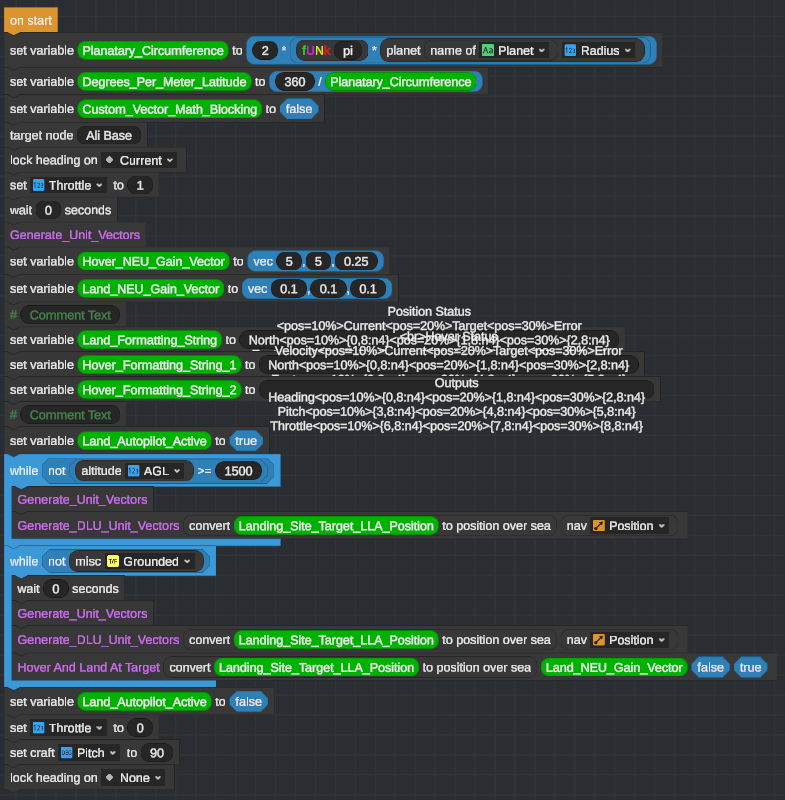
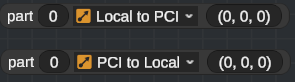
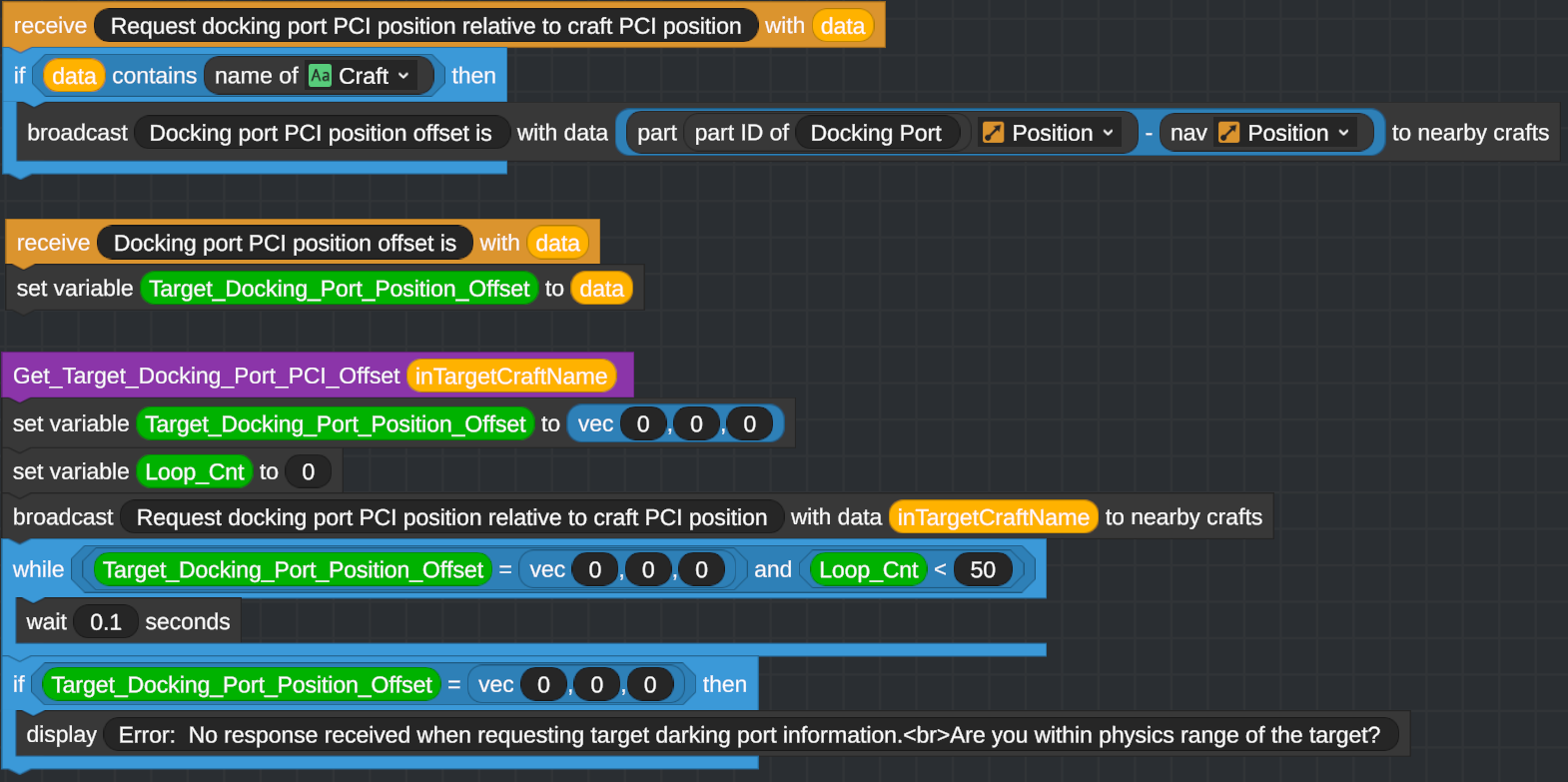
It is just 0, NEU_Vector(x), Land_NEU_Position_Error_Vector(x) repeated three times, swapping x for y and z. The leading 0 is also repeated in each iteration, so (very abbreviated) the full set of parameters is 0, V(x), E(x), 0, V(y), E(y), 0, V(z), E(z).
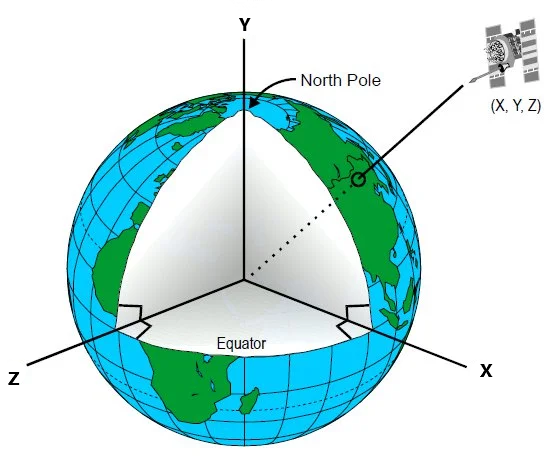
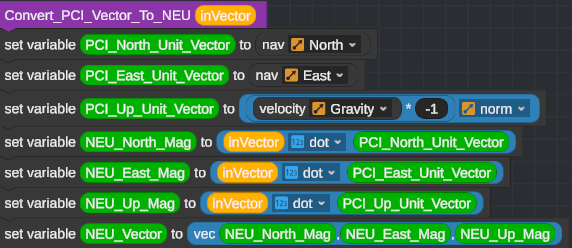
The reason for the repeated zeros is that the crafts current position defines the origin of the coordinate system being used, so it is always at (0, 0, 0).
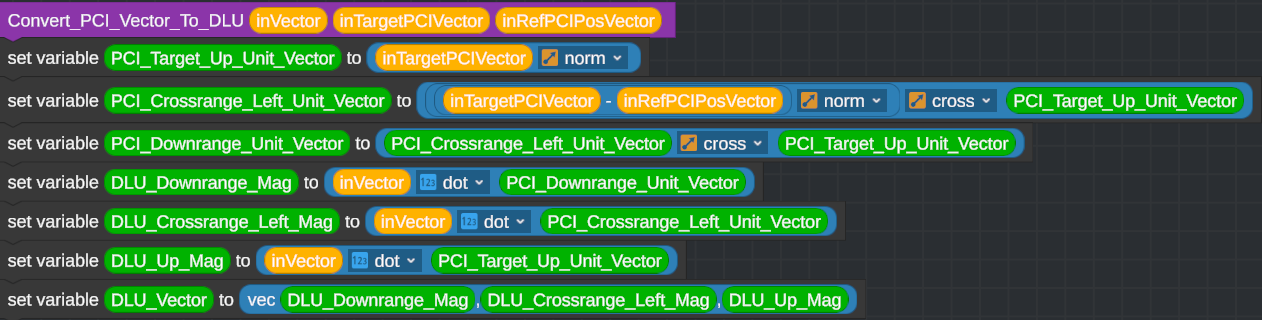
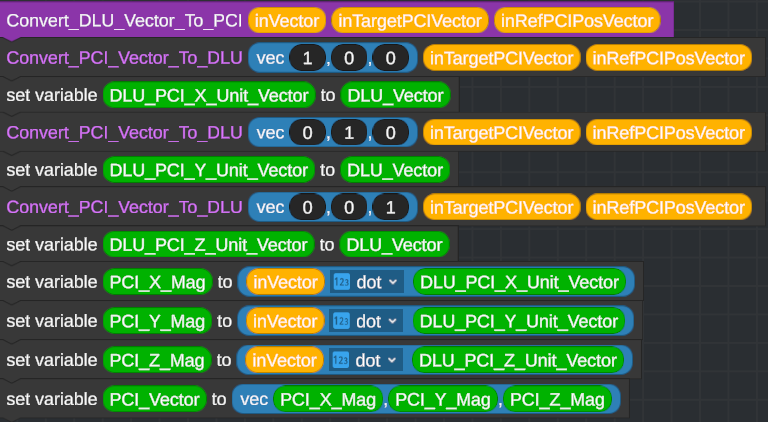
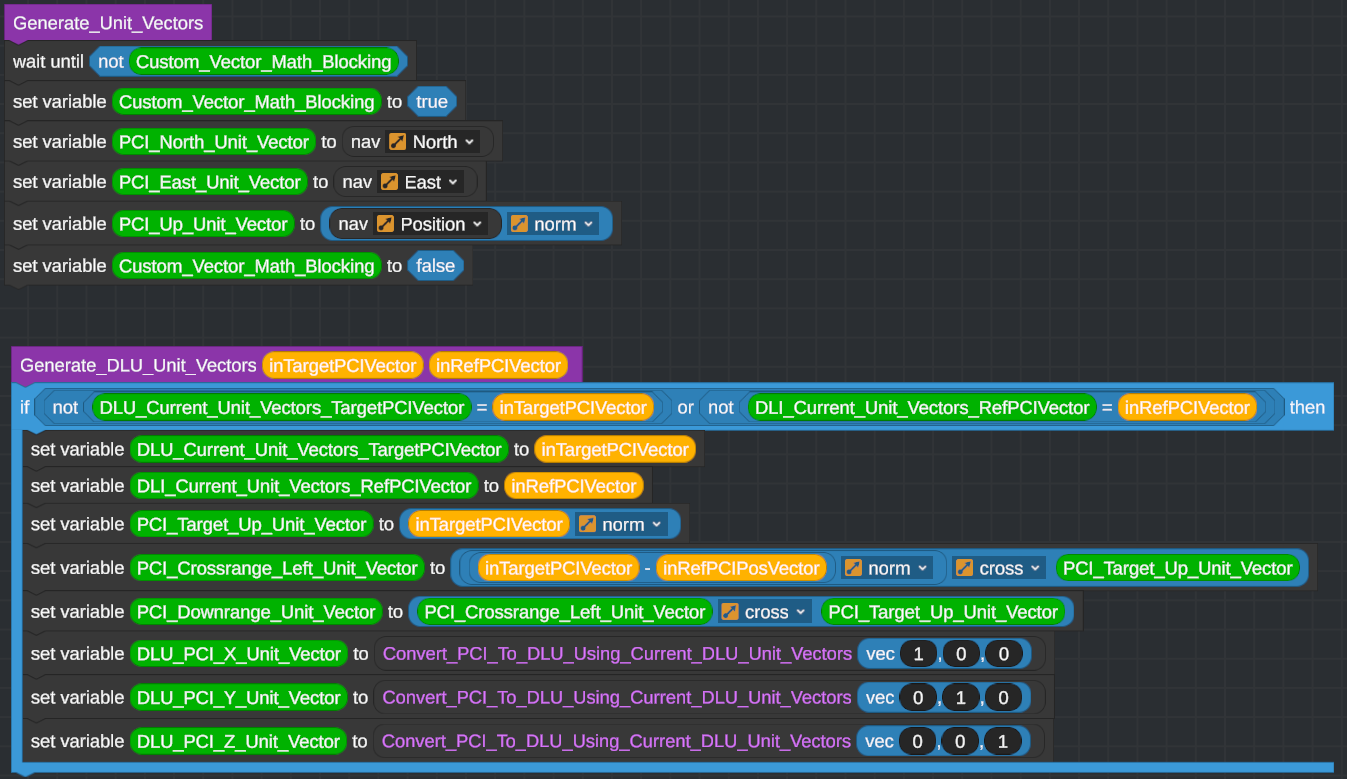
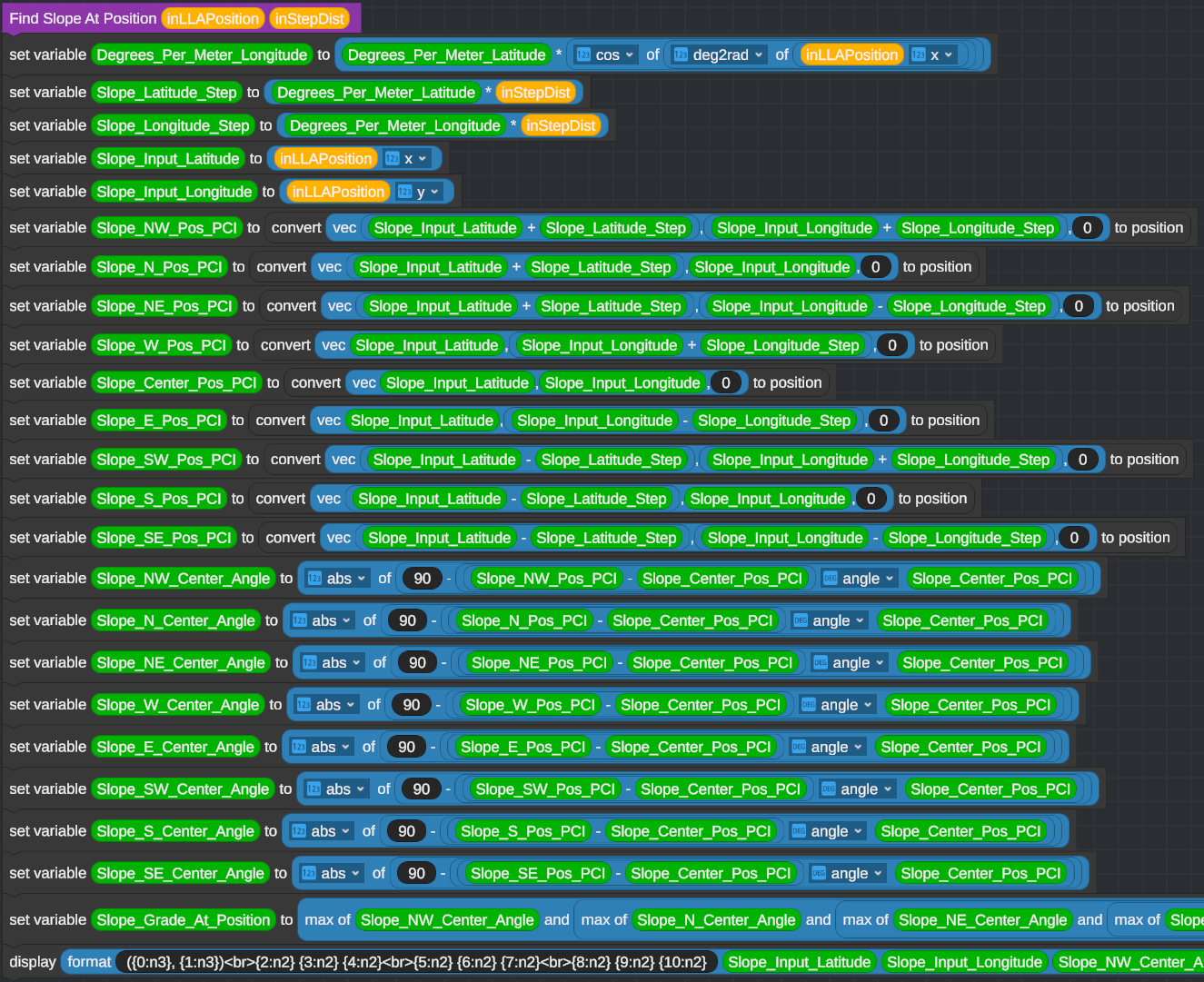
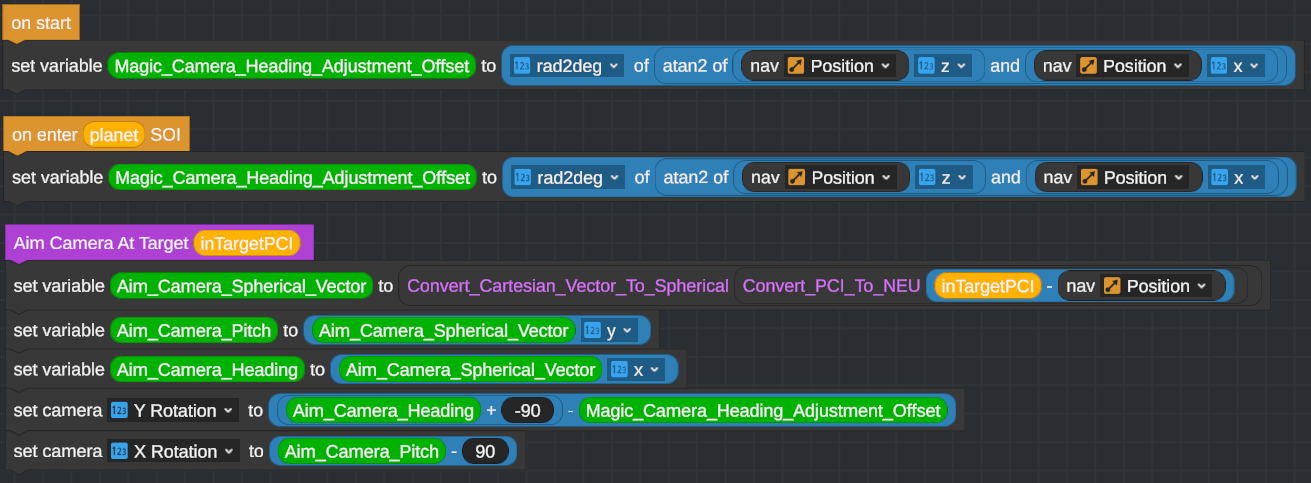
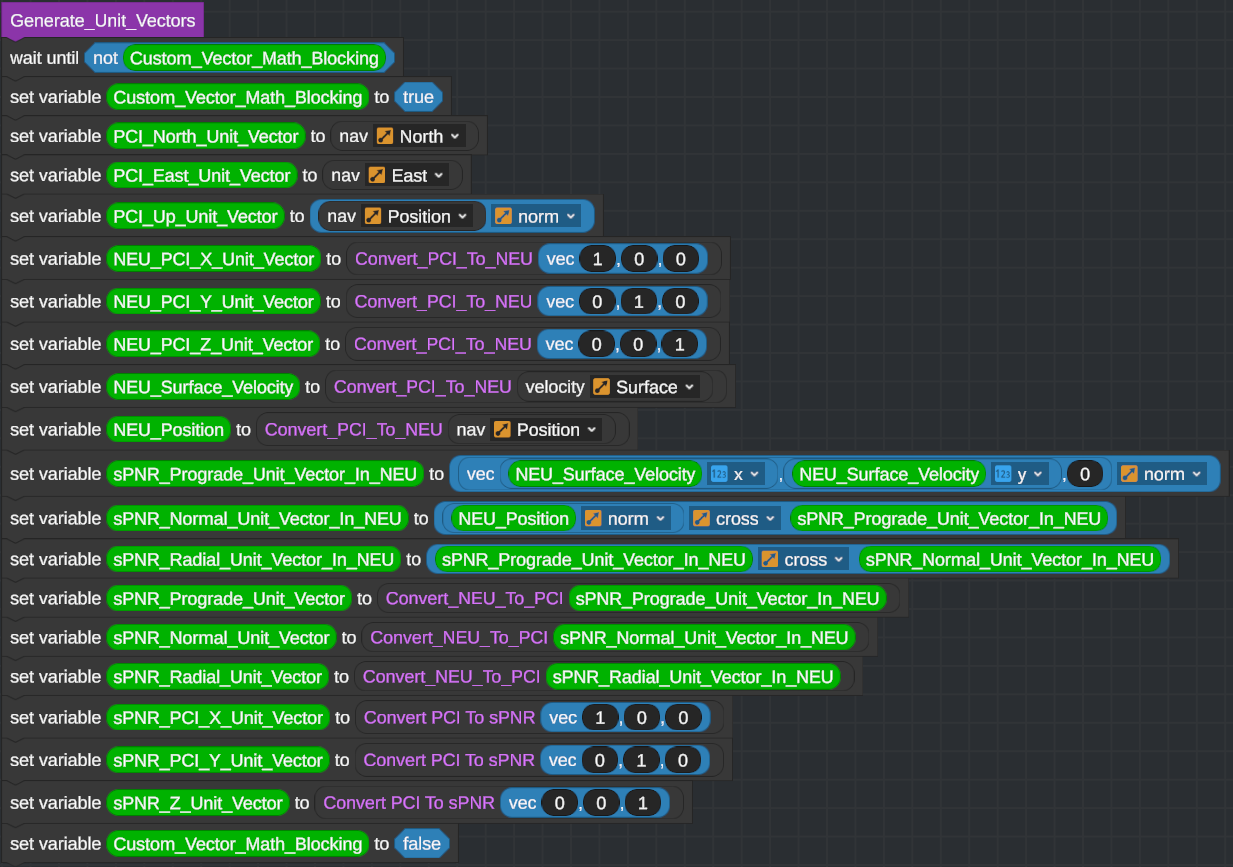
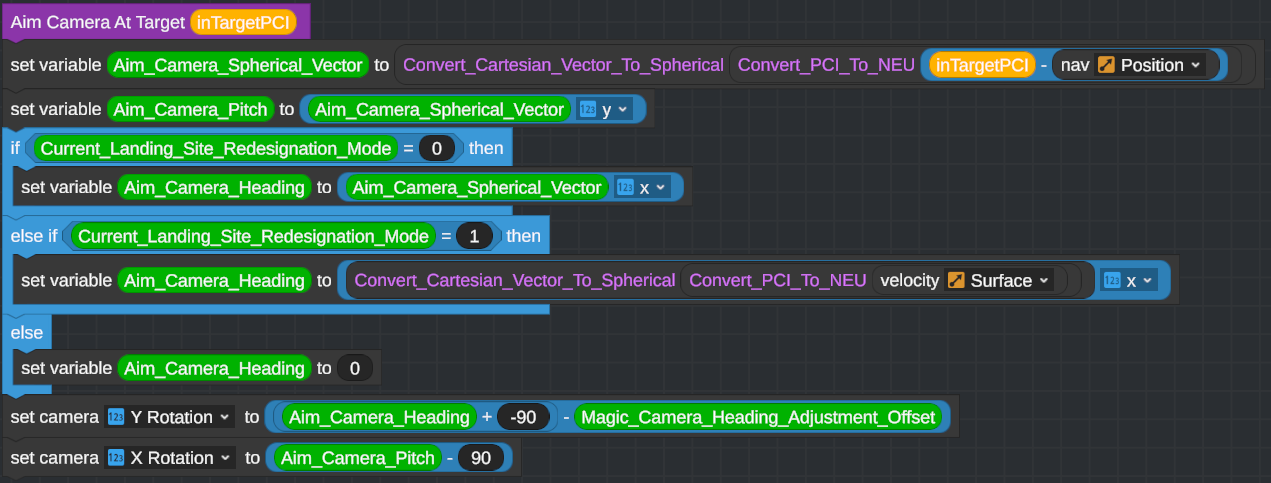
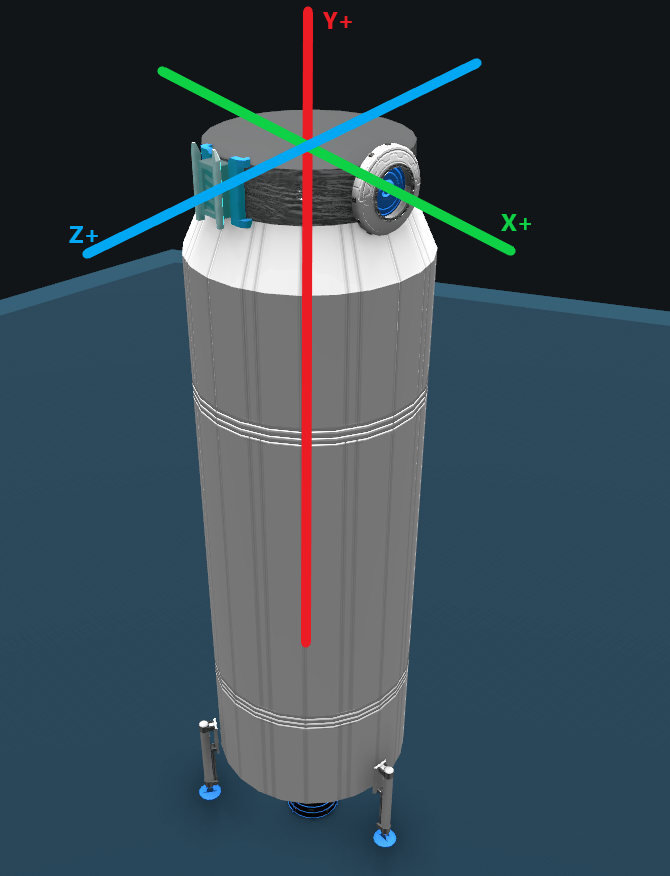
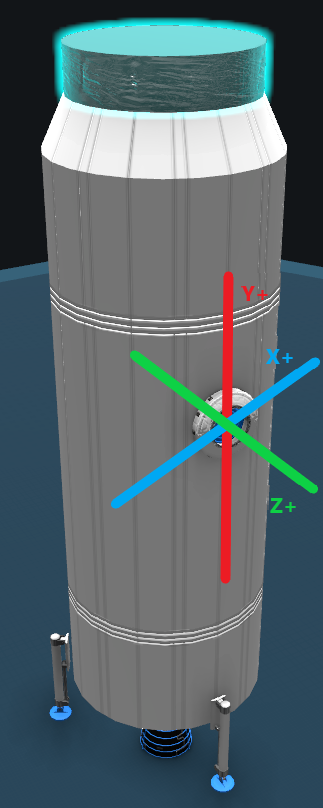
I believe the Z axis in the diagram shows the PCI coord system(the "Redefining axes for fun and profit" section) is in its opposite direction
Did you ever hear back from Steam about fixing their platform, or recovering your work?
This guide is a great resource. Let me know if I can help reconstruct it.
Assuming I don't get back a helpful response from Steam, I'm considering rewriting the guide on GitHub or similar. While it would be a pain to do so, at least it would be much less likely that my guide would glitch out after a few months.
I also understand that you don't want to share the .xml source code files. Would you be willing to put the images in a zip file and share it? (email, file sharing site, etc.)
Me too! (well, not Va Tech, but you get the picture). That's why I wrote this guide -- I figured that there were a significant number of people that realized that "Vectors can do some spiffy stuff, but I don't quite remember the details" to fill in the gaps in knowledge.
The issue is that the majority of the images in the guide have disappeared. And Steam won't allow me to re-upload the images either. I can rename the images and then they upload without issue, but since the image name has changed I then have to update the guide text to point at the new image. Given that there are 50 images that have disappeared this is close to "Rewrite the guide from scratch," and given that I don't know why it happened in the first place, it seems... Risky to spend hours (literally) re-uploading images only to discover that they disappear again after a few months.
For what its worth (not much, I suspect), I've opened a Steam support ticket to see what they say.